Specifications
Highlights
Our mission is to create a vehicle capable of propulsive landing as well as a platform for EPFL Rocket Team to develop technologies pertaining to active control and thrust vectoring for use in future vehicles. Such an usage would be a dedicated module on-board the next Firehorn-class rocket. We aim to foster learning opportunities for students and bring our association closer to space through innovative engineering and collaborative efforts.
GNC Algorithms
The base of the project is the development of various control, navigation, and guidance algorithms. These algorithms aim to control the stability of the hopper and optimize its trajectory throughout the flight in order to reach its objective, and in the near future, to enable it to land successfully.
Due to the complexity of the task and the number of parameters taken into account, we chose to use predictive control techniques based on a dynamic model in combination with high-frequency LQR for low-level control. These algorithms need information about the position, attitude, and velocity of the vehicle, this is the role of the navigation algorithm, which combines IMU, pressure sensor, and an RTK GPS with dual GNSS through advanced Kalman filtering. These techniques make it possible to anticipate, in near real time, the future evolution of the hopper’s state and thus optimize the control commands.
Hopper
Overview

The Hopper, a pioneering vehicle showing off the ERT versatility, is a new vehicle with custom control systems and homemade structure, GNC algorithms and electronics. Capable of propulsive landing, propelled by our bi-liquid ethanol-N2O DEMO A3 engine.
Composed of 4 main parts, the avionics hardware collects the sensor data, treats it and feeds it to GNC to subsequently actuate the engine.
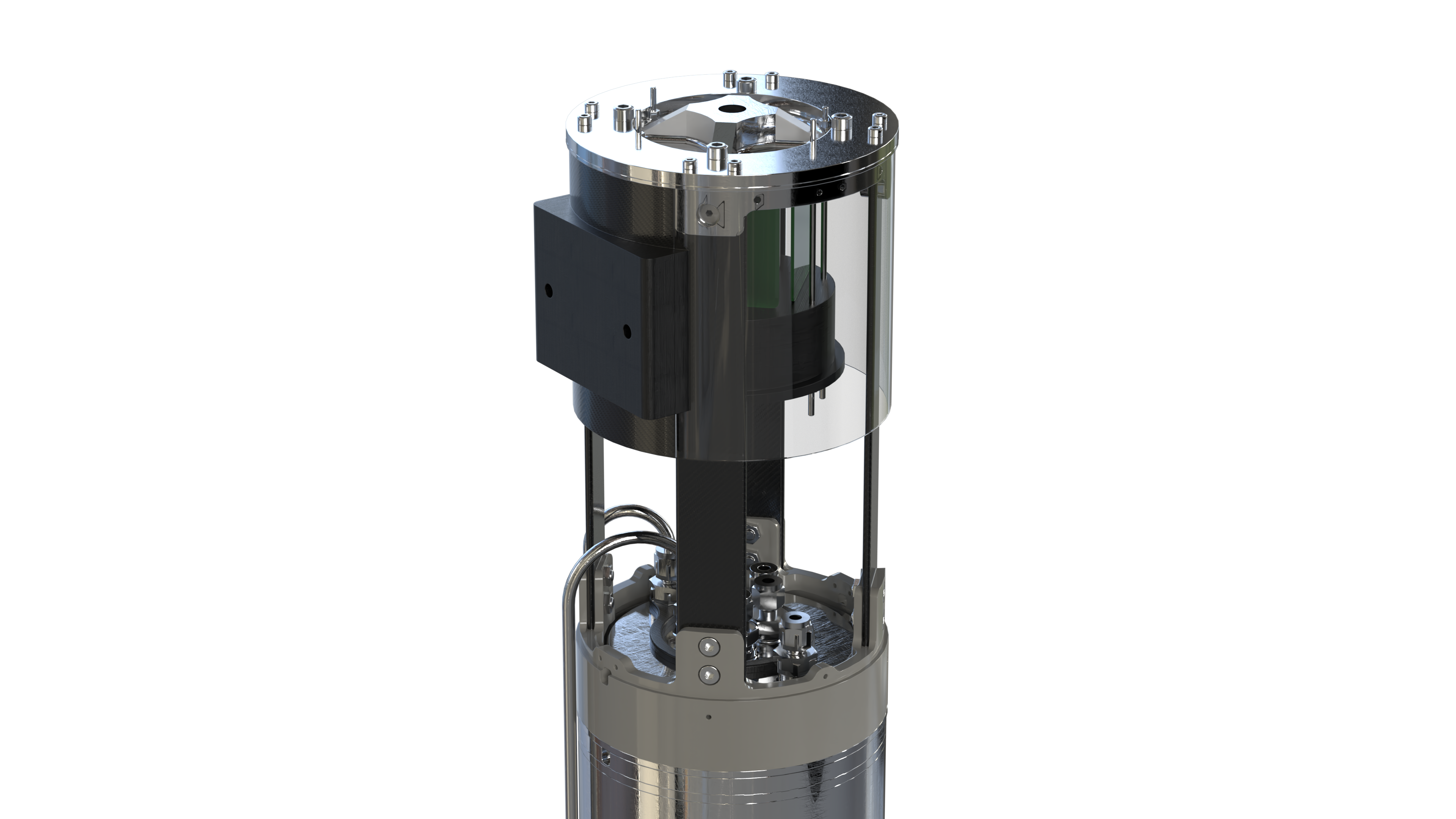
The Hopper's Upper Structure consists of a SRAD coaxial tank, a COPV tank, the Avionics bay, and the Battery box.

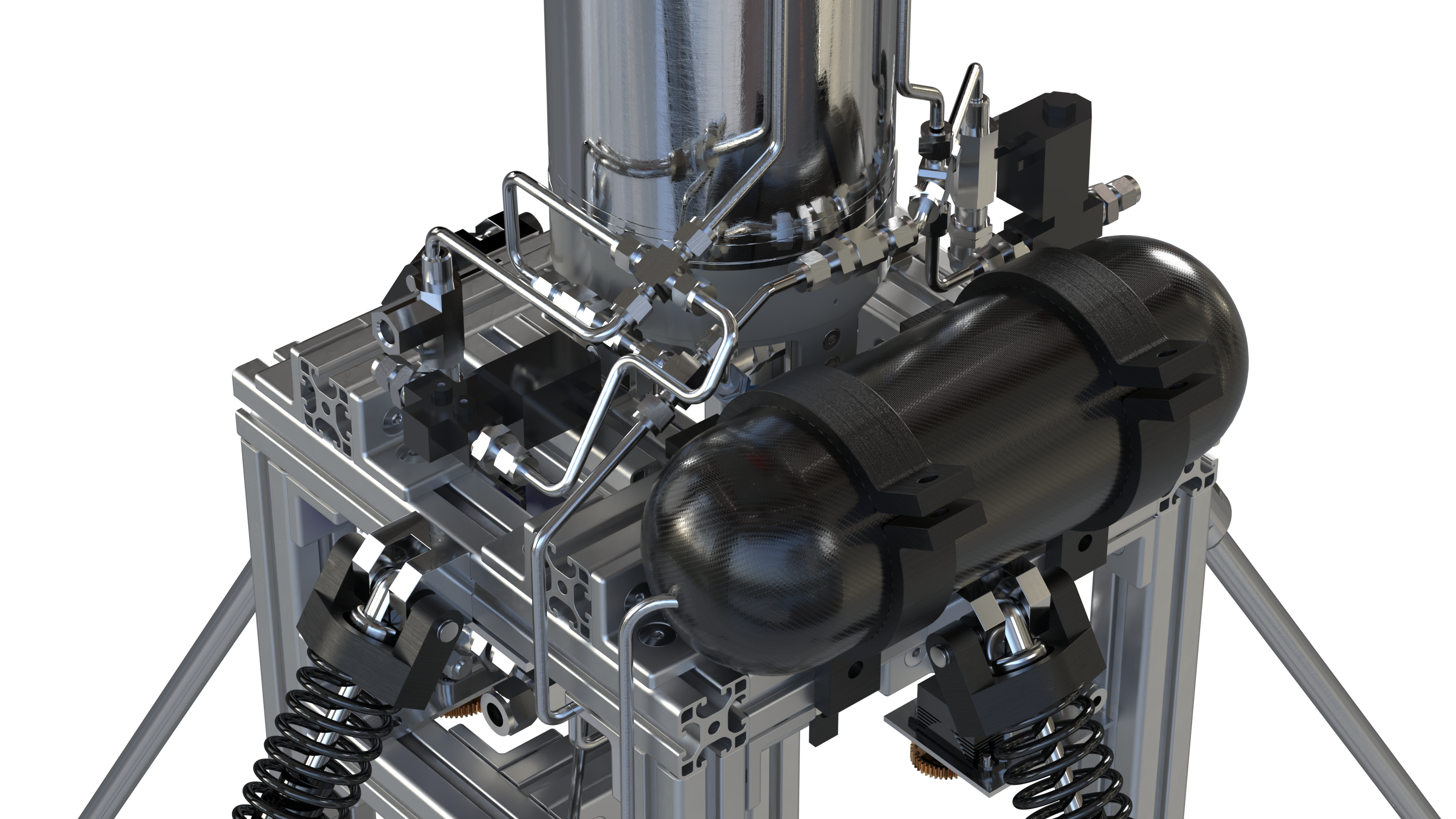
As the central part of the Hopper, the Middle Structure consists as a interface between legs and Upper structure. Mounted on it are the batteries, the flight termination system, COPV, and propulsion interfaces.
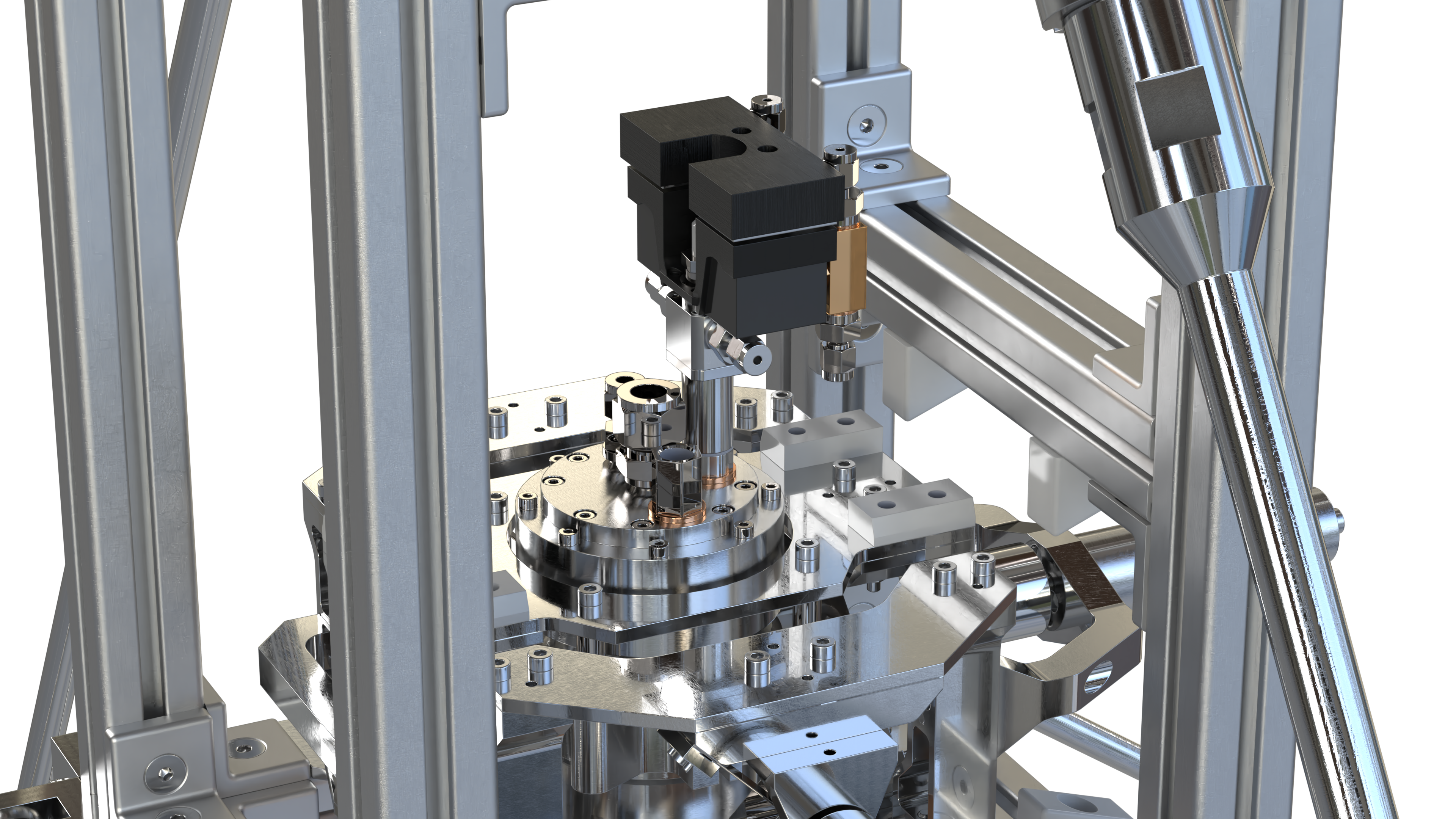
Built with cross-spring pivots, the 2 degree of freedom gimbal mechanism assures Thrust Vector Control (TVC) required to develop an actively controlled hopper vehicle.
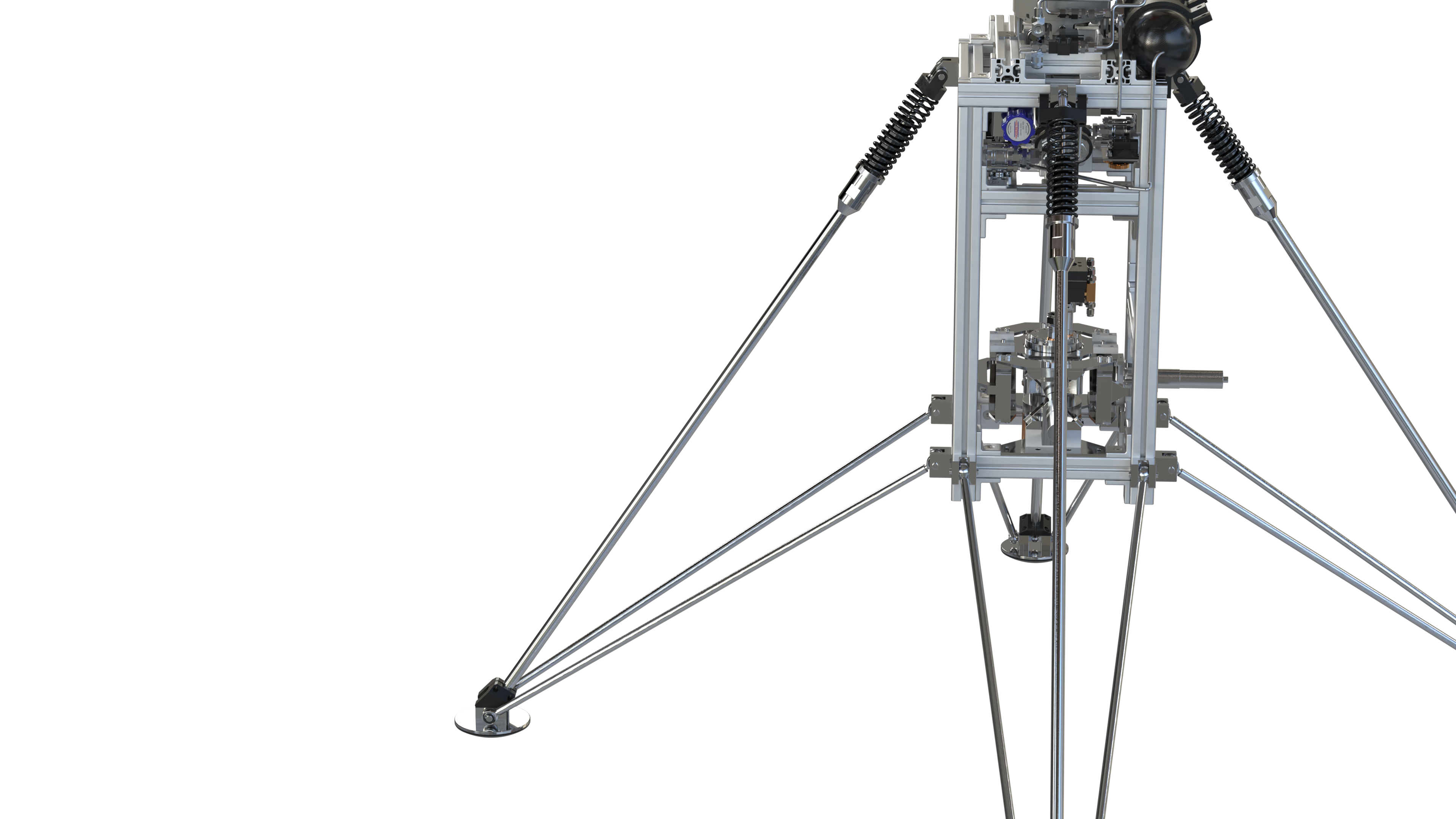
Designed to land the Hopper and absorb a 10g vertical deceleration equivalent to a 1.5 meters drop. The legs of the Hopper consist of one central leg equipped with a damper and two lateral legs.
Propulsion
The DEMO A3 is a bi-liquid engine running on Ethanol and Nitrous Oxide, fully designed and built in-house by the Icarus propulsion team. More details will be added as the project progresses.
Drone
The drone serves as a test platform for the development and validation of control algorithms, avionics, and embedded systems before their integration on the hopper. Designed to replicate the hopper’s dynamics, it incorporates the hopper’s gimbal concept, making its control deliberately unstable and demanding. This configuration allows efficient testing of GNC algorithms, onboard electronics, and sensor behavior under realistic conditions while minimizing the costs and risks associated with rocket engine powered flight.
The drone’s structure combines carbon and aluminum tubes, spring steel blades, and parts printed in PETG and TPU, providing a framework that balances mass efficiency and modularity. This robust design ensures the availability of an operable drone dedicated to rapid testing, integration of new technologies, and validation of concepts intended for future iterations of the Icarus project.

Questions